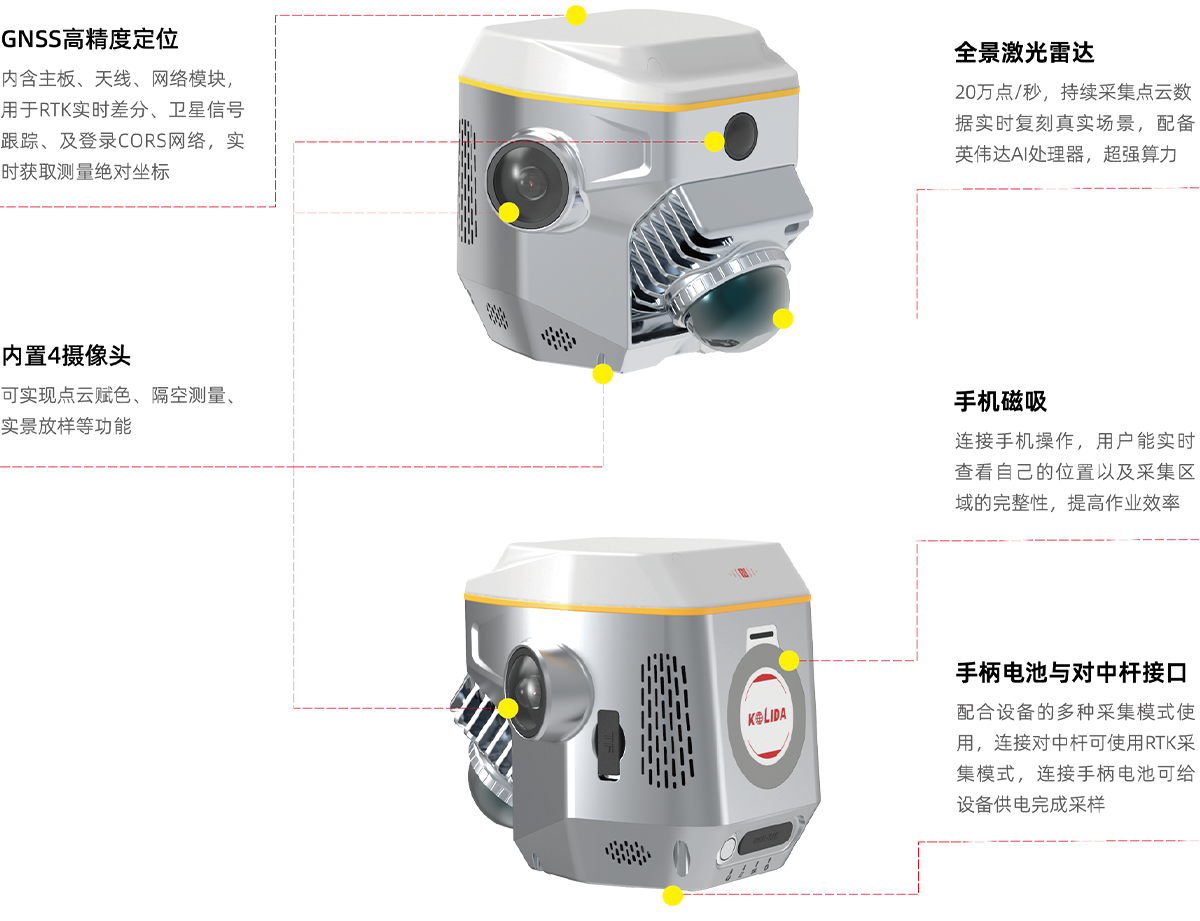
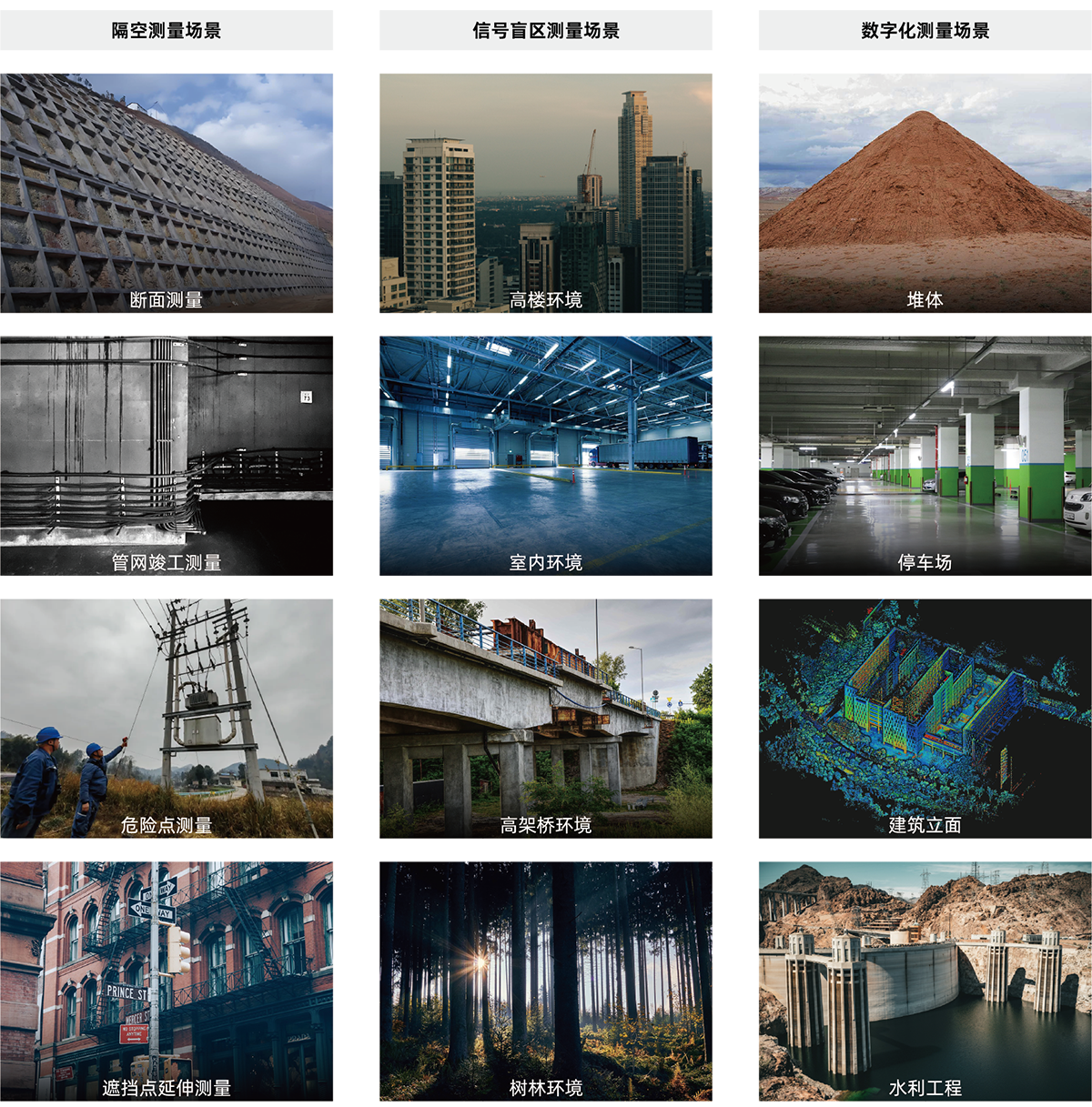
采用RTK-SLAM双模融合算法架构,通过GNSS卫星信号与激光SLAM的实时闭环校验机制,有效克服卫星信号遮蔽场景的定位盲区。在室内、隧道及地下空间等非视距环境下,系统可实现动态厘米级定位精度,满足高精度导航需求。

搭载量子级激光感知阵列模组,具备20万点/秒的高密度点云数据采集能力。集成智能影像时空匹配引擎,采用基于深度学习的特征点云配准算法,可在单次扫描中完成全场景三维坐标的同步解算与拓扑重建。支持复杂环境下的非接触式高精度测量。

搭载NVIDIA高算力AI处理器,集成实时点云解算引擎与真彩色点云可视化模块,支持外业端即测即览、动态量测。自主研发的智能监测算法可同步追踪项目进度与点云质量,通过闭环反馈机制降低返工率,综合作业效率显著提升。

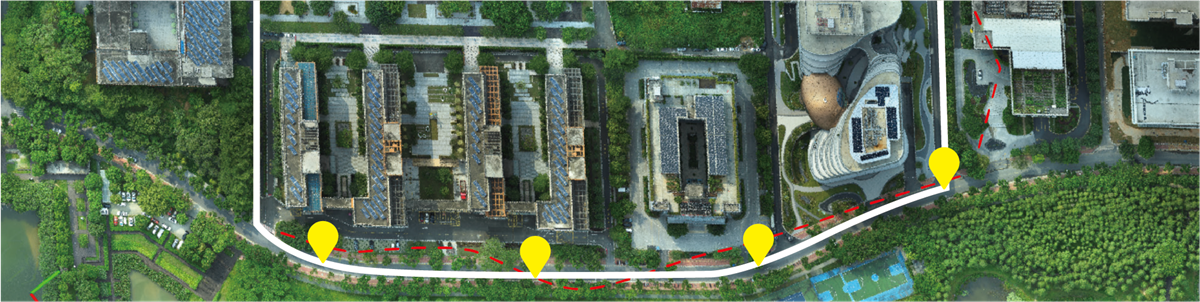
采用实时动态载波相位差分技术实现厘米级定位校准,通过多星座GNSS卫星信号与惯导系统(IMU)的紧耦合解算,消除传统SLAM方案对回环闭合的依赖。用户可自主规划非结构化采集路径,系统支持动态路径优化与实时精度补偿,无需预设控制点即可保证全局坐标一致性。

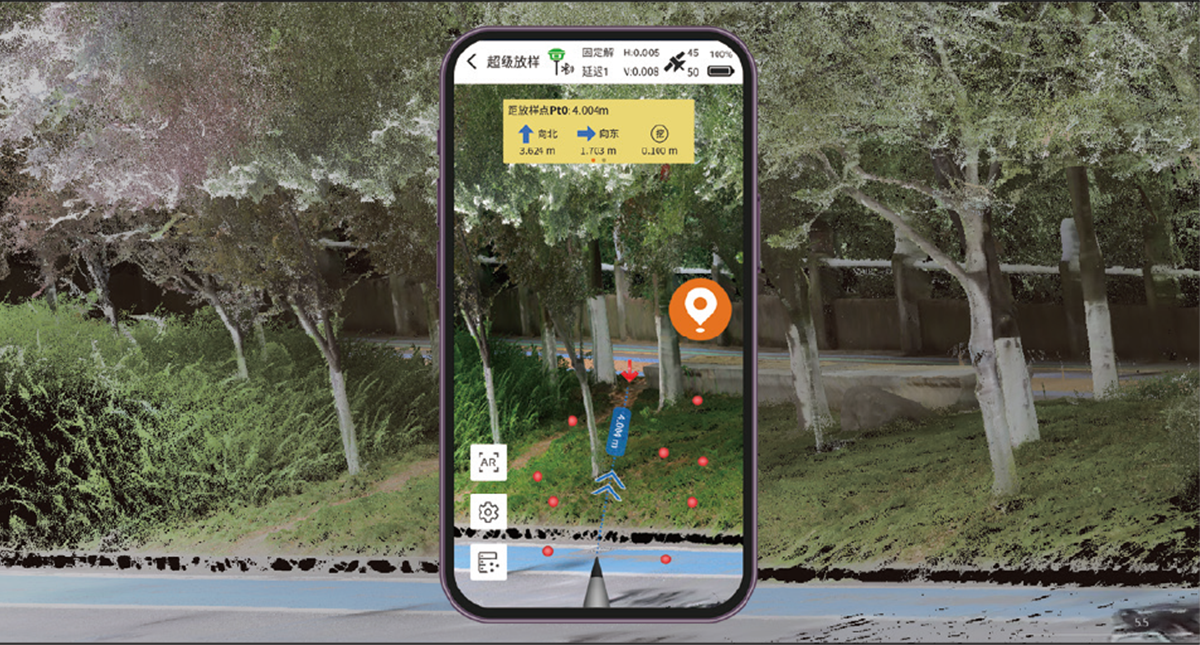
创新开发三维点云可视化交互系统,集成多目标智能识别与动态路径规划功能,支持基于场景语义分析的点位自动标定。系统通过增强现实(AR)界面实现放样轨迹的实时三维可视化投影,结合多传感器融合导航引擎(视觉、惯性测量单元与超宽带定位技术协同)提供高精度定位指引。
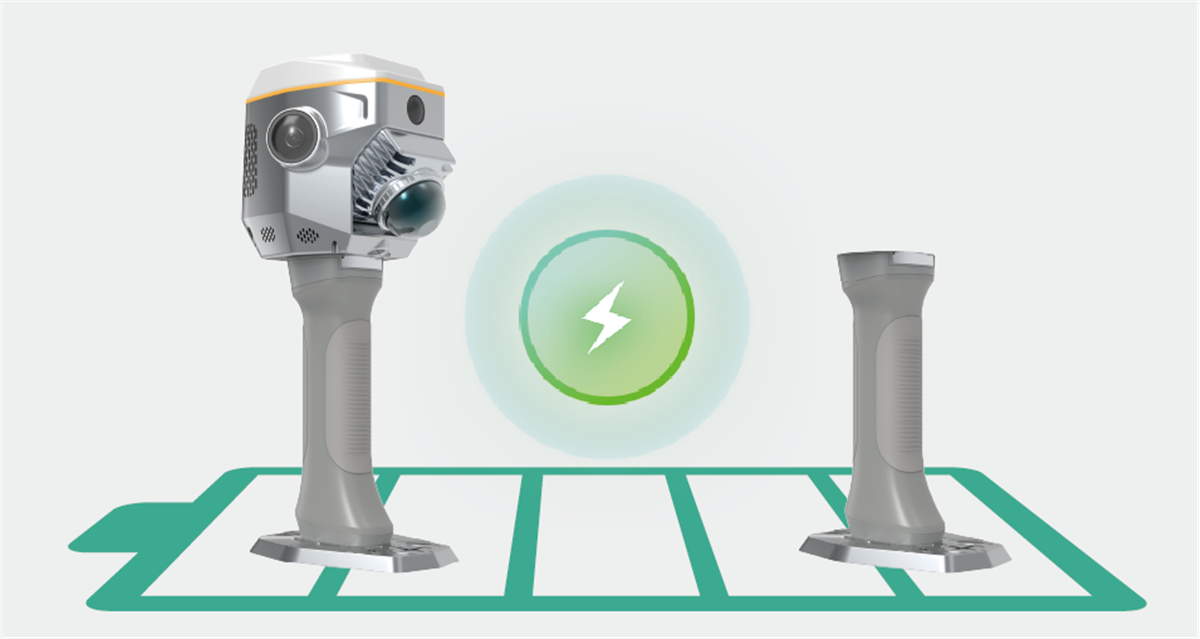
主机采用多模态冗余供电架构,支持内置电池、手柄电池及外接电源的并行供电模式,通过智能电源管理模块实现无缝电源切换。系统采用热插拔式电源更换设计,在设备运行状态下可动态切换供电来源,无需执行系统重启或传感器初始化流程,有效降低因电力中断导致的作业停滞风险,提升整体作业效率。
系统通过多源数据融合架构,将高精度实时动态载波相位差分(RTK)定位数据与同步定位与地图构建(SLAM)算法进行深度耦合,利用RTK的绝对定位优势对SLAM的相对定位结果进行动态修正。通过闭环误差补偿机制与多传感器协同标定,有效抑制定位误差的时空累积效应,显著提升复杂测绘环境(如城市峡谷、密林、地下空间)下的定位稳定性与全局一致性。
配置 | 详细参数 |
测量性能 | |
信号跟踪 | 1598通道;BDS-2:B1I、B2I、B3I;BDS-3:B1I、B3I、B1C、B2a、B2b |
GPS: L1C/A,L2P,L2C,L5,L1C*;GLONASS: G1,G2,G3*;Galileo:E1,E5b,E5a,E5 AltBoc*,E6c* | |
SBAS:L1C/A,L5*;QZSS:L1 、L2C、 L5;IRNSS:L5* | |
GNSS特性 | 定位输出频率 1Hz~20Hz;初始化时间 小于10秒;初始化可靠性 >99.9%; |
全星座接收技术,能够支持来自所有现行的和规划中的GNSS星座信号; | |
高可靠载波跟踪技术,提高载波精度,提供高质量原始观测数据; | |
智能动态灵敏度定位技术,适应各种环境变换,适应恶劣、远距离定位环境 | |
定位精度 | |
静态测量精度 | 平面:±(2.5+0.5×10-6D)mm;高程:±(5+0.5×10-6D)mm;(D为所测量的基线长度) |
RTK测量精度 | 平面:±(8+1×10-6D)mm;高程:±(15+1×10-6D)mm;(D为所测量的基线长度) |
断点续测 | 水平精度RTK:5+10mm/分钟RMS;垂直精度RTK: 5+20mm/分钟RMS |
点云精度 | |
相对精度 | <1cm |
绝对精度 | <5cm |
惯导 | |
惯导倾斜测量 | 内置IMU惯性测量传感器,支持惯导倾斜测量功能,根据对中杆倾斜方向和角度自动校正坐标 |
IMU更新率 | 200HZ |
倾斜角度 | 0°~60° |
倾斜补偿精度 | 1.8米杆;RMS:8 mm + 0.7 mm/°tilt;(tilt为倾斜角度) |
通讯 | |
网络模块 | 配备4G全网通高速网络通讯模块,兼容各种CORS系统接 入。内置ESIM卡,标配3年测绘流量 |
蓝牙 | BT4.2(BR/EDR+BLE)蓝牙标准 |
WIFI | 802.11b/g/n标准,具有WIFI热点功能 |
任何智能终端均可接入接收机,对接收机进行功能配置 | |
接收机可接入WIFI,通过WIFI进行差分数据播发或接收 | |
NFC无线通信 | 采用NFC无线通信技术,手簿与主机触碰即可实现蓝牙自动配对(需手簿同样配备NFC无线通信模块) |
硬件 | |
接口 | Type_C口(充电、带串口功能) |
SIM卡接口 | |
拓展TF卡接口 | |
存储 | 内置64G固态存储(512G可拓展) |
重量 | 单整机重量约1.2kg(含内置电池) |
供电 | 支持手柄电池供电,支持外接电源供电 |
支持外置电源和内置电池热切换 | |
(无需关机即可完成电源切换) | |
防护等级 | IP64 |
温度 | 工作温度:–20 °C至+55 °C |
存储温度:–40 °C至+85 °C | |
相机参数 | |
数量 | 4 |
像素 | 1200W*2 |
800W*1 | |
200W*1 | |
激光雷达 | |
人眼安全级别 | Class1 人眼安全 |
测程 | 40m@10% 反射率;70m@80%反射率 |
角度 | 水平 360°, 竖直 -7°~52° |
点云输出 | 20万点/秒 |
融合功能 | |
连续定位 | <0.05% * 累积距离 |
组合解 | 支持,无信号或弱信号能实现厘米级定位 |
隔空测量 | 支持,可无接触式批量获取目标点坐标 |